ニュース
“無人”自動運転車両が空港を変える。ANA、JALが羽田などで実用化
それでは、ANA、JAL両社が実用化した自動運転車両の詳細と運用を紹介していこう。
信号機の設置で交差点問題を解消。旅客便が駐まるスポットへ貨物を搬送

まずANAであるが、これは2024年7月に行なわれた実証試験をブラッシュアップして実用化したもので、豊田自動織機の電動トーイングトラクター「3TE25」をベースとした車両を運用。導入段階では羽田空港に3台の自動運転車両を配備。2025年度内に6台へと拡充する予定だ。
3D LiDAR、2Dレーザースキャナによる障害物検知機能のほか、自車の位置を推定する(自己位置推定)のために、3D LiDARによる周囲の認識と点群地図データとの照合、底面に設置されているカメラ、GNSSによる衛星測位、MIセンサーによる磁気マーカーの検知といった機能を持つ。冗長性を持たせるために2種を組み合わせながら自己位置推定をするのが大きな特徴だ。
車両の詳細を説明した株式会社豊田自動織機 トヨタL&Fカンパニー AR開発部の深津史浩氏は、「航空の安全はもとより、定時性を確保するために、あらゆる環境下で、停止することなく確実に走行する自動運転が必要。そのために自己位置推定の冗長化に取り組んだ」と話す。例えば、3D LiDARと点群データの照合は構造物という固定された物理的特徴が周囲に多いターミナル付近の道路を走るのは得意な一方で、周囲が開けている駐機場は判定が難しい。そうした駐機場ではGNSSによる衛星測位が適しているが、こちらは建屋内など開けていない場所では精度が落ちるなど、それぞれの技術の得手不得手をカバーし合いながら正確な自己位置推定を行なうのである。

ちなみに、2024年度に行なわれた実証実験では、自動運転による車両が目的地に到着する確率が、当初70%程度であったという。これは自動走行する車両がスポット付近に駐車する際に、ほかのGSE車両と干渉してしまう課題があったためだ。そこで、自動運転車両とGSEが駐車するそれぞれの位置、GSEが航空機に寄り付く経路をゼロベースで組み立て直すことで干渉を回避。約98%まで自動走行が完了するよう改善が図られた。
また、雨天時に車両が停止してしまう課題もあったという。これは雨粒を障害物として検知してしまうことが原因となっていた。実用化にあたって、センサーで検知した物体の選別精度を調整することで、雨天時も実証実験時以上の走行を果たせる仕様になったとしている。
今回の実用化にあたってANAは、国内貨物上屋と60/61/65番の3スポットの間で自動走行を行なうこととした。距離は片道約1.5km、走行時間は7~8分である。2024年度に行なわれた実証実験との大きな違いとして、このルートには交差点があることが挙げられる。
ここで採られた対応が、国交省による信号機の設置である。今回のレベル4自動運転トーイングトラクターの実用化にあたり、国交省ではカメラや信号機といった自動運転で必要とされる共通インフラ(VME:Vehicle Management Equipment in airport restricted areas)を整備。信号機も国交省が整備したVMEで、58番スポット周辺の2か所に整備された。
信号機は自動運転車両に対しての制御には利用されず、有人運転の車両に対しての指示となる。通常時は黄色点滅をしている信号は、自動運転車両が接近すると赤点滅へ変更。有人運転車両は赤点滅時は一時停止をして、自動運転車両の通過を待って進行することになる。つまり、自動運転車両は信号に関わらず優先的に走行し、有人運転車両=人の力が、安全な走行を確保する運用であるといえる。
この仕組みは、自動運転車両を遠隔管理・監視するFMS(Fleet Management System)にとの連携で実現している。FMSでは車両、フライト、行き先、積載貨物や現場スタッフの作業項目などあらゆる情報が一元的に登録されている。自動運転中の車両が信号のある交差点に近づいたことを検知すると、ドーリーの連結数に応じた最適な信号切り替えを信号(VME)にリクエスト。このリクエストを受けて、通過に要する所要時間に応じた赤点滅信号に切り替わるのである。
スポットでは、所定の停止場所に到着次第、自動走行を終了。以降はグランドハンドリングスタッフの運転によってドーリーの連結/切り離しや、ハイリフトローダーベルトローダーへの寄り付きなどの作業が行なわれる。

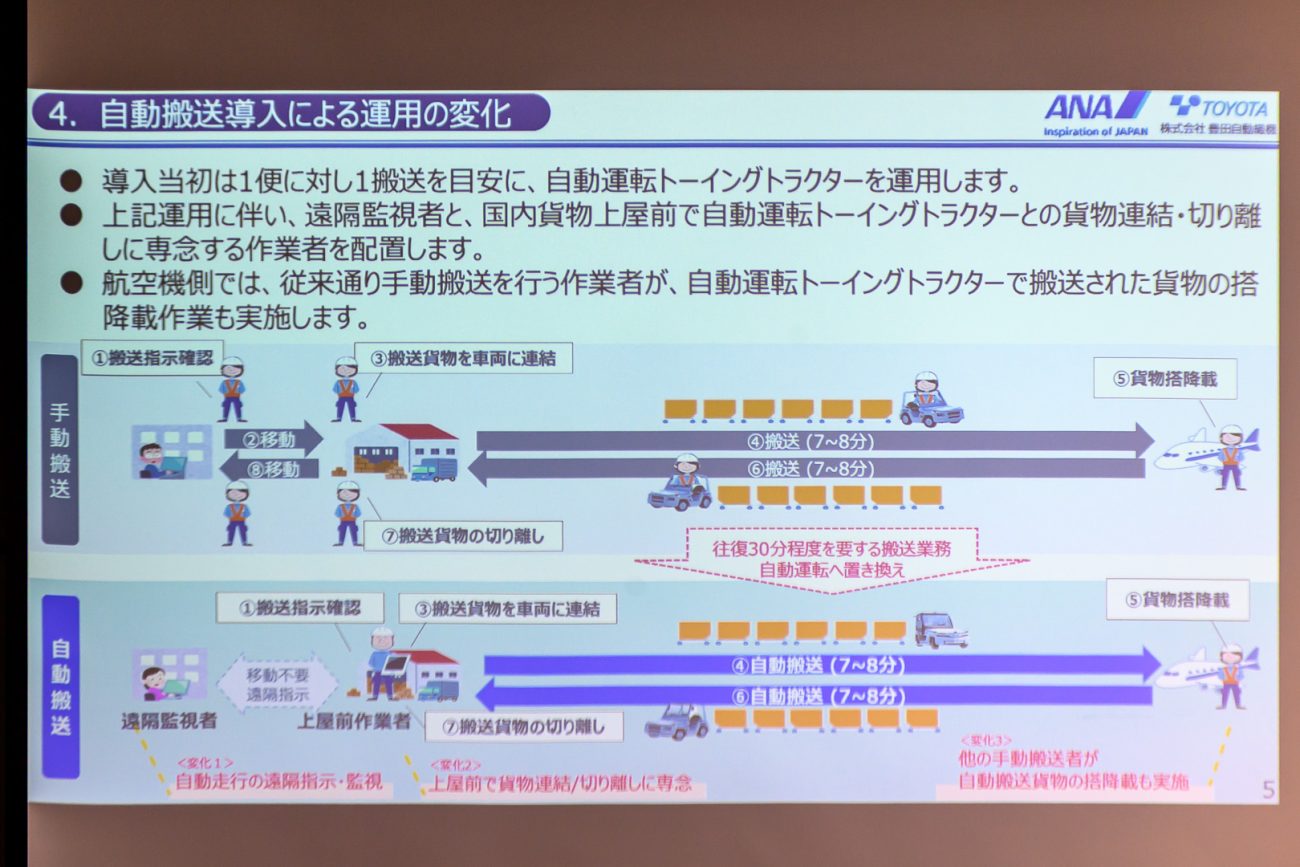
ANAでは当面、1便につき複数台での搬送がある便を対象に、そのうちの1便を自動運転車両に置き換える。これにより、貨物上屋と事務所間、貨物上屋とスポット間で人の関わる必要がなくなる。一方、FMS/VMEを管理・監視する遠隔監視者が追加で必要となる。スポットでは貨物の降積載を行なうグランドハンドリングスタッフがそのまま車両も運用する。よって、自動運転化によって“1名減”の体制で1便を運航できることになる。
その後は羽田空港へ2030年時点で貨物搬送車両の半分となる50台規模を導入する一方で、全国6空港程度へ拡大している方針を示している。
JALは羽田、成田の2空港で実用化、異なる車両を使用

JALは12月から羽田空港、成田空港の2空港でレベル4自動運転トーイングトラクターによる貨物搬送を実用化した。
羽田空港では、丸紅とROBO-HI(旧ZMP)の合弁会社であるAiROが提供する自動運転トーイングトラクター「RoboCar Tractor 25T」を使用。この自動運転トーイングトラクターは中国Guangtai(ガンタイ)の車両をベースに、ROBO-HIの自動運転システムを実装したものとなる。こうした市販車をベースにした自動運転車両の開発は、ZMP時代から培ったAiROの強みを活かしているといえるだろう。
自己位置推定には車両の天部と前方左右部に付けられた3D LiDARとカメラ、IMU、GNSS(衛星測位)といったセンサーを使用。同社独自の自動運転システムである「IZAC」、「ROBO-HI OS」で制御する。ROBO-HI OSはクラウドシステムとなっており、遠隔で車両の運行管理や監視、位置などを行なえるのみならず、国交省が提供する共通インフラであるVMEとも連携。ケースによっては車両の停止指示も行なえる。

JALでは国内線の西貨物上屋(第1ターミナル側)、東貨物上屋(第2ターミナル側)の間の約1km、所要時間5分30秒において自動運転車両を導入。この間にある、幅約200mの誘導路を横断する車両を監視するためのカメラ、消防署前の給油所が渋滞しているとドーリーが干渉して緊急車両の走行を妨げる可能性がある場所を監視するためのカメラを、それぞれ国交省がVMEとして設置した。
運用開始当初は1台の運用となるが、すでに2台を発注しており、2026年夏までには導入される見込みだ。


また、羽田空港においては、国内線の貨物エリアと国際線の貨物エリアの間を結ぶルートでも実証試験を行ない、導入の検討を進めている。こちらには、国内線の東西貨物エリア間とは異なる課題がある。
一つはトンネルを通過する必要がある点で、この走行は問題のないことを確認できているという。一方、3方向すべてが一時停止となっている三叉路があり、ここには信号機が必要になる可能性が高い。
また、114番スポットに到着する航空機がある場合にブラストの影響を受ける区間があり、路面に「ブラスト注意」の標識と停止線が設置されている箇所がある(気になる方はGoogle Mapの航空写真などでも確認可能だ)。エンジンをかけずにトーイングされている機体の場合は通行可能であり、その判断が自動運転車両には難しいという。ここでもカメラなど、航空機の位置や状態を把握できる、なんらかのインフラが新たに必要になる見込みだ。
なお、JALでは成田空港でも自動運転トーイングトラクターを実用化。こちらは、ナガセテクノサービスが提供するTLD製のTractEasyをベースとした自動運転車両を2台導入。第2旅客ターミナル本館とサテライト間での貨物搬送に利用している。こちらも追加で4台を発注済みで、今春には導入される見込みだ。

羽田空港、成田空港合わせてANA、JALともに3台でスタートした自動運転トーイングトラクターの実用化。現状の車両は、量産品として販売されているものではないため、やはり高額ではあるという。もちろん、全国、全世界の空港で当たり前の存在になれば車両メーカーが量産品として商品化し、それに伴って販売金額も下がることになるだろう。
そうした将来のためには、空港側においても羽田で国交省が設置したような、信号機や自動運転をサポートする監視カメラ、あるいは電動車両の充電設備などのインフラ整備も求められる。充電設備であれば、最近では、神戸空港において神戸市がEV充電設備を整備した例や、成田国際空港株式会社が70基規模の充電設備の設計に着手したことを発表するなど、空港を管理する自治体や民間企業による取り組みも始まっている。もちろん、それを利用するのは民間のエアラインであり、グランドハンドリング企業となる。こうした官・民が連携したインフラ整備の必要性がより求められることになるだろう。
台数としては小規模ながらも、羽田空港、成田空港という日本を代表する空港で自動運転トーイングトラクターが実用化されたことは、グランドハンドリングの現場に大きな転換点を迎えたといえる。2026年はこうした空港業務の変化が始まる一年になるだろうか。期待を込めて注目していきたい。
関連記事





